
Figure 4
- ID
- ZDB-FIG-250325-39
- Publication
- Ravel et al., 2025 - Modeling zebrafish escape swim reveals maximum neuromuscular power output and efficient body movement adaptation to increased water viscosity
- Other Figures
- All Figure Page
- Back to All Figure Page
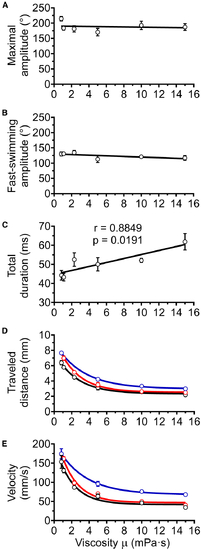
Kinematic analysis of zebrafish EFP-induced escape response across variations in experimental and Parameters were measured by kinematic analysis recorded from original movies (back lines) or through numerical simulations. Numerical simulations were performed with isolated body movements recorded in media of 0.83–15 mPa⋅s (red lines) or with the movements recorded in water (0.83 mPa⋅s) followed by computational enhancements of viscosity up to 15 mPa⋅s (blue lines). (A) Maximal head-tail angle, which measures the amplitude of the C-bend and counterbend, was not correlated with viscosity. (B) Fast-swim beat amplitude, defined as average amplitude of peaks during fast swimming, was not correlated with viscosity. (C) Total time for completion of the initial six tail bend/beats increased with viscosity. Total escape duration was significantly correlated with fluid viscosity as tested by Pearson’s test, and the linear regression slope was significantly different from zero ( (D) Distance traveled over six tail bend/beats measured through kinematic analysis on original videos and during simulations. Coefficients of determination R2 > 0.95 for both nonlinear regressions. (E) The average escape velocity, calculated over the duration of the six tail bends/beats, decreased exponentially with both experimental and |