
Fig. 2
- ID
- ZDB-FIG-251002-44
- Publication
- Lau et al., 2025 - Supraspinal commands have a modular organization that is behavioral context specific
- Other Figures
- All Figure Page
- Back to All Figure Page
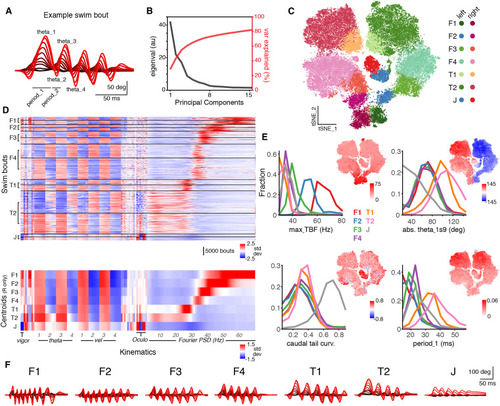
Swim bouts form a kinematic sequence (A) Example swim bout, shown as time-varying cumulative bend angle along the length of the trunk/tail (rostral caudal indicated black red). Some example kinematics are illustrated. theta_1–4, bend angle for half-beats 1–4; period_1,2, duration of half-beats 1 and 2. (B) Principal-component eigenvalues of the kinematic covariance matrix and cumulative percentage of variance explained by the principal components. (C) t-SNE embedding of swim bouts, colored by bout label (determined by an independent clustering procedure, see Figure S2). (D) Top: Kinematic vectors of all swim bouts, grouped by type and further subdivided into left- (upper rows) and right-lateralized (lower rows) swims. Bottom: Kinematic centroids for 7 (right-lateralized) bout types. Each kinematic feature (column) was normalized (z-scored) within fish. Kinematics related to swim vigor, bend angles (theta), and velocities (vel) over four half-beats, oculomotor parameters, and Fourier coefficients are indicated. For detailed breakdown see Table S1. (E) Distributions of several kinematic features across 7 bout types (left and right swims combined). Insets show t-SNE embedding, colored by kinematic value. Clockwise from top left: max_TBF, maximum tail-beat frequency, which separates different types of forward swim; theta_1s9, peak bend angle at tail segment 9 during half-beat 1, which is greater for T1 and T2 turns; period_1, duration of half-beat 1, which is longer for turns; caudal tail curve (fcC1), fraction of total bend angle localized to caudal tail segments during half-beat 1, which is elevated for J-turns. (F) Example (rightward) bouts of each type. |