|
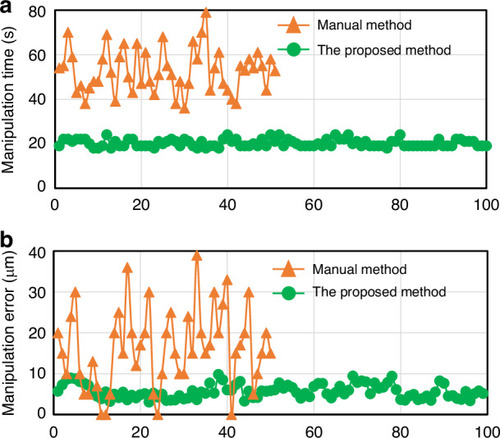
Results of comparison between the manual and proposed methods. a The injection time of individual cells. The manipulation time of individual cells is defined as follows: The starting time point of the manual method is to start searching for the cells, and the ending time point is to pull out the injection needle from the cell. The starting time point of the proposed method is that the feeding pump starts to load cells, and the ending time point is that the holding pump completely releases the cells and transports them. b Injection position error. The manipulation error is defined as needle tip deviation from the desired position. The actual position of the needle tip is calculated by vision-tracking. The desired position of the needle tip is the yolk center of the cell, which is detected by the deep-learning algorithm
|