
Fig. 10
- ID
- ZDB-FIG-231005-48
- Publication
- Cano-Ferrer et al., 2023 - OptoPi: An open source flexible platform for the analysis of small animal behaviour
- Other Figures
- All Figure Page
- Back to All Figure Page
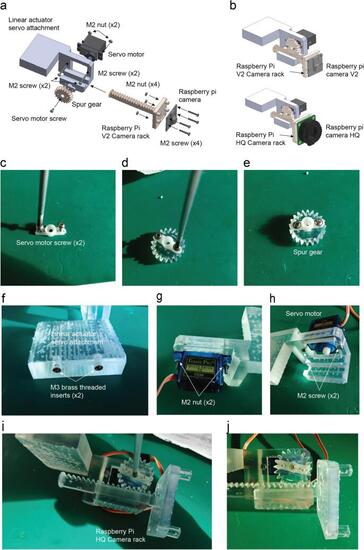
Electromechanical camera linear stage assembly. a. Exploded view. b. Assembled view of both Raspberry Pi camera versions (V2 and HQ) 3D printed holders (Supplementary video 7). c. The servo motor arm is shortened by cutting both sides at the level of the third hole. Then the servo motor screws are screwed in the second hole on each side of the servo motor. d. The arm is placed over the spur gear with the holes coincident. e. The servo arm and the spur gear are attached with the screws. f. Two M3 threaded inserts are inserted by applying pressure before curing the resin. g. The servo motor is attached using two M2 screws with M2 nuts. h. Detail of the M2 screws on the front view of the assembly. i. Spur gear assembly, the rack is placed in the channel and then the spur gear is attached making the teeth coincident and keeping the maximum travel range. j. The servo motor screw holds the spur gear as a final step. |