|
Figure 1
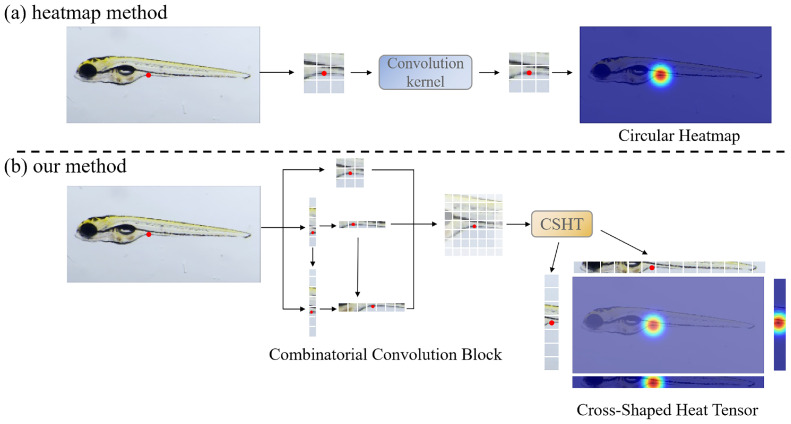
Comparison of the conventional keypoint detection framework and ours. (

|
|
Figure 1
Comparison of the conventional keypoint detection framework and ours. (