
Fig 1
- ID
- ZDB-FIG-230312-1
- Publication
- Holman et al., 2023 - A behavioral and modeling study of control algorithms underlying the translational optomotor response in larval zebrafish with implications for neural circuit function
- Other Figures
- All Figure Page
- Back to All Figure Page
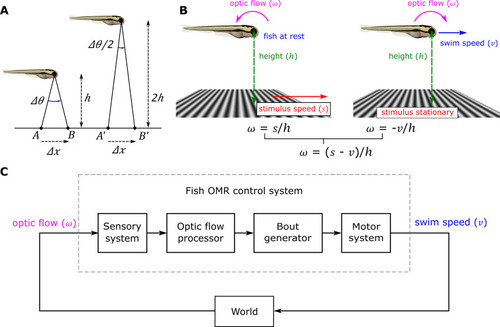
Optic flow and feedback control of the OMR.
(A) Optic flow is inversely proportional to height. The fish on the left is at rest a distance ℎ above a moving stimulus. A point on the stimulus moves forward a small distance Δx from A to B over time Δt, causing the angle of the ray passing from that point through the optical center of the eye to change by Δθ with corresponding optic flow of Δθ/Δt radians/s. The fish on the right at twice a height experiences half the change in angle, Δθ/2, for the same small stimulus movement in the same time, and thus half the optic flow. If the stimulus speed is s, Δθ = Δθ/h = sΔt/h, so the optical flow ω = Δθ/Δt = s/h. (B) Optic flow is a combination of baseline flow and swim-induced flow. As in (A), a fish at rest at height h with the stimulus below moving at speed s experiences a positive (anticlockwise) baseline optic flow of s/h rad/s when expressed as an angular velocity (left). Conversely, swimming at speed ν over a stationary grid induces a negative optic flow of -ν/h rad/s (right). When both fish and the grid are moving the opposing optic flows sum to a total of (s - ν)/h rad/s. (C). The overall system is a closed-loop feedback system with gain inversely proportional to height. Any change in the swim speed output causes a change in the optic flow input, which in turn feeds back to affect future swimming. Following [9], the system’s feedback gain can be defined as the change in optic flow caused by a small change in the swim speed taken as an index of motor effort, divided by that swim speed change, i.e., the derivative of the input with respect to the output dω/dν. The optic flow ω = (s - ν)/h, with s and h constant for any given trial, so the feedback gain dω/dν = -1/h. Like the optic flow itself, the feedback gain is inversely proportional to the height of the fish above the ground–in fact it is just the negative reciprocal of the height. |